Sistem pengangkutan trek tanpa pemandu untuk lombong bawah tanah

Fungsi sistem
Sistem lokomotif elektrik tanpa pemandu terdiri daripada sistem kawalan operasi automatik (ATO), unit kawalan PLC, unit penentududukan ketepatan, unit pendispensan pintar, unit rangkaian komunikasi wayarles, unit kawalan penutupan berpusat isyarat suis, pemantauan video dan AI video sistem, dan pusat kawalan.
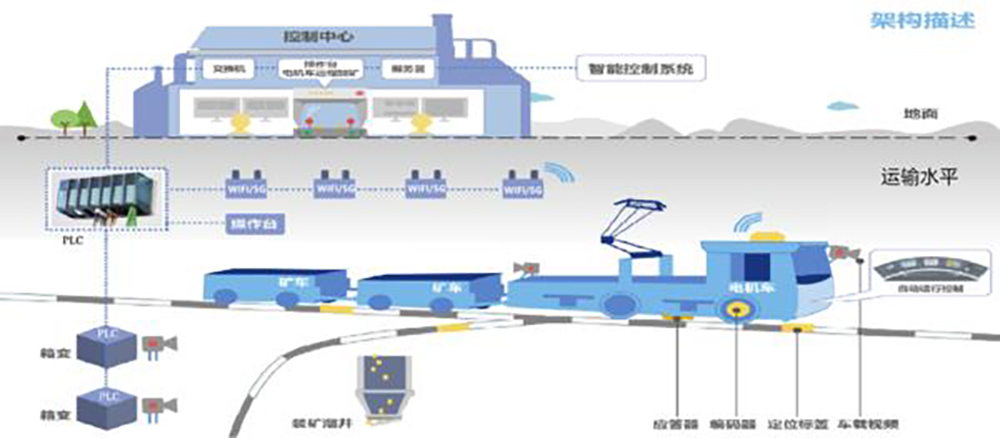
Penerangan ringkas tentang fungsi
Operasi pelayaran automatik sepenuhnya:mengikut teori pelayaran kelajuan tetap, mengikut situasi dan keperluan sebenar pada setiap titik tahap pengangkutan, model pelayaran kenderaan dibina untuk merealisasikan pelarasan autonomi lokomotif terhadap kelajuan perjalanan.
Sistem penentududukan yang tepat:kedudukan tepat lokomotif dicapai melalui teknologi komunikasi dan teknologi pengecaman suar, dsb., dengan mengangkat busur automatik dan pelarasan kelajuan autonomi.
Penghantaran pintar:Melalui pengumpulan data seperti tahap bahan dan gred setiap pelongsor, dan kemudian mengikut kedudukan masa nyata dan status operasi setiap lokomotif, lokomotif secara automatik ditugaskan untuk berfungsi.
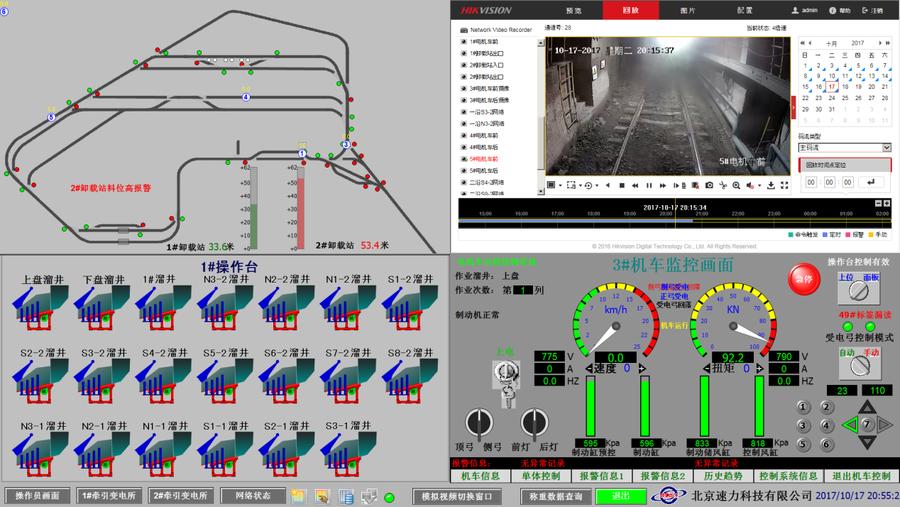
Pemuatan manual jauh:Pemuatan manual jauh boleh dicapai di permukaan dengan mengawal peralatan pemuatan.(Sistem pemuatan automatik sepenuhnya pilihan)
Pengesanan halangan dan perlindungan keselamatan:Dengan menambahkan peranti radar berketepatan tinggi di hadapan kenderaan untuk mencapai pengesanan orang, kenderaan dan batu yang jatuh di hadapan kenderaan, untuk memastikan jarak kenderaan yang selamat, kenderaan secara autonomi menyelesaikan beberapa operasi seperti membunyikan hon dan brek.
Fungsi statistik pengeluaran:Sistem secara automatik melakukan analisis statistik parameter larian lokomotif, trajektori larian, log arahan dan penyiapan pengeluaran untuk membentuk laporan larian pengeluaran.
Sorotan sistem.
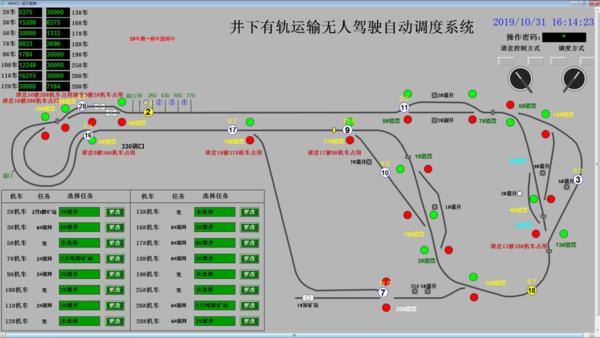
Operasi automatik sistem pengangkutan rel bawah tanah.
Merintis mod operasi baharu untuk lokomotif elektif bawah tanah tanpa pemandu.
Merealisasikan pengurusan rangkaian, digital dan visual sistem pengangkutan rel bawah tanah.

Analisis Faedah Keberkesanan Sistem
Di bawah tanah tanpa pengawasan, mengoptimumkan corak pengeluaran.
Menyelaraskan bilangan orang yang bekerja dan mengurangkan kos buruh.
Memperbaiki persekitaran kerja dan meningkatkan keselamatan intrinsik.
Mekanisme operasi pintar untuk mengurus perubahan.
Faedah ekonomi.
-Kecekapan:peningkatan produktiviti dengan satu lokomotif.
Pengeluaran yang stabil melalui pengedaran bijih pintar.
-Kakitangan:pemandu lokomotif dan operator pelepasan lombong dalam satu.
Seorang pekerja boleh mengawal pelbagai lokomotif.
Pengurangan bilangan kakitangan dalam kedudukan semasa memunggah lombong.
-Peralatan:mengurangkan kos campur tangan manusia ke atas peralatan.
Faedah pengurusan.
Analisis data peralatan untuk membolehkan pra-servis peralatan dan mengurangkan kos pengurusan peralatan.
Memperbaik model pengeluaran, mengoptimumkan kakitangan dan mengurangkan kos pengurusan kakitangan.





